.")
Creating digital maps for highly and fully automated driving
Digital maps are a key prerequisite for ATO (Automatic Train Operation). They provide a highly accurate digital representation of the infrastructure and support reliable obstacle detection and precise train localisation.
In recent years, numerous projects of the sector initiative Digitale Schiene Deutschland (DSD) have made it clear that digital maps are essential for digitized rail operations. This applies to highly automated driving (ATO Grade of Automation 2/ GoA2), in which the vehicle drives automatically but the train driver continues to monitor the route from the driver´s cab and intervenes in emergencies. However, digital maps are also a key component of fully automated driving (ATO Grade of Automation 4/GoA4), where obstacle detection is also automated and taken over by technical systems.
The digital map contains static infrastructure data, such as objects along the tracks, which are digitally depicted as three-dimensional landmarks. These include, for example, overhead line masts, signals and platforms. The route topology (gradients, inclines, tunnels, etc.) of the rail network is also included in the digital map. A very precise and detailed digital representation of the railway environment is particularly important for driverless railway operations. This poses new challenges for the digital map. On the one hand, there are more stringent requirements for the content of the map on the train side. On the other hand, safety aspects are coming to the fore, as future safety-relevant systems will be dependent on the infrastructure data of the digital map. These new requirements necessitate the development of new map creation and verification processes.
.")
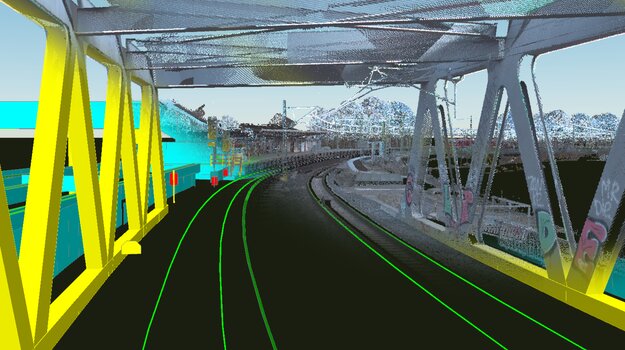
When creating the digital map, DB InfraGO's existing data is supplemented by additional infrastructure objects and three-dimensional, more detailed representations of these. High-precision Lidar point clouds are used as the basis for creating the 3D objects, which map the immediate track area in its entirety. The high resolution (point density) results in a very high volume of data. In addition, information on object types and geometries can only be obtained indirectly and by interpreting the point cloud. It is therefore necessary to convert the data into a more suitable format for use in automated driving. By using a so-called semantic map (see figure), which describes individual objects using attributes and simplified geometries, both the necessary data volume can be greatly reduced and the interpretation of the data considerably simplified.
In a current technical article in the February issue of Eisenbahningenieur, the team of experts from Digitale Schiene Deutschland describes in detail the creation of high-precision digital maps for railway operations. The article also describes the cooperation with the industry and in the European initiative Europe's Rail Joint Undertaking (ERJU), in which standardised map creation is being tested and formats for exchanging new map data are being developed.
Link to Article Digitale Karten für das vollautomatisierte Fahren auf der Schiene | Februar 2025 (only german)